
All categories
Featured selections
Trade Assurance
Buyer Central
Help Center
Get the app
Become a supplier
(25022 produk tersedia)


































 Ready to Ship
Ready to Ship




 Ready to Ship
Ready to Ship

























 Ready to Ship
Ready to Ship






 Ready to Ship
Ready to Ship










 Ready to Ship
Ready to Ship
















 Ready to Ship
Ready to Ship
























































 Ready to Ship
Ready to Ship
























 Ready to Ship
Ready to Ship











Mekanisme robot adalah sistem yang mentransfer gerakan dan gaya dari satu bagian ke bagian lainnya. Robot dirancang untuk membantu dalam berbagai tugas; dengan demikian, mekanismenya pun bervariasi. Berikut adalah jenis-jenis mekanisme robot yang umum:
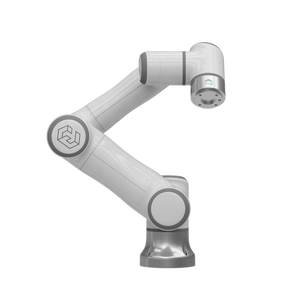
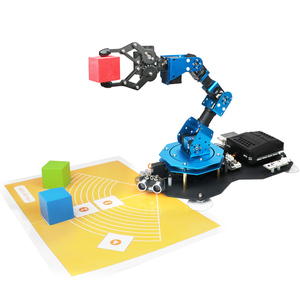
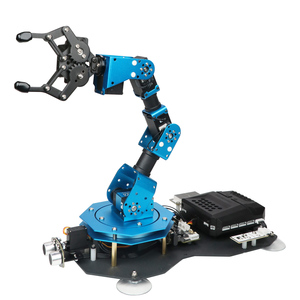
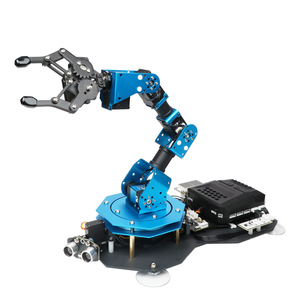
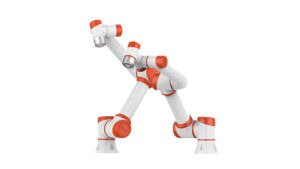
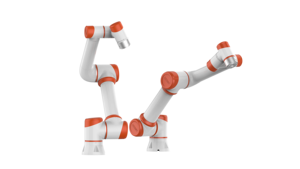
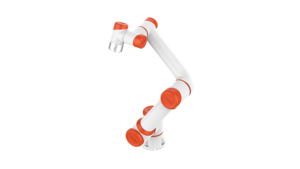
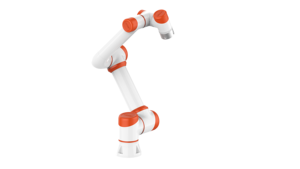
Robot Artikulasi
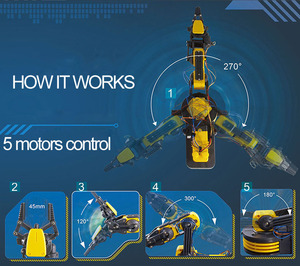
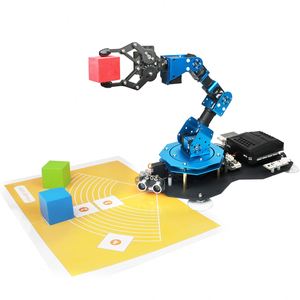
Robot artikulasi memiliki 3 hingga 6 sendi yang terhubung melalui lengan. Robot ini menyerupai tangan manusia karena fleksibilitasnya. Lengan robot dapat berputar ke berbagai arah, memungkinkan mesin untuk melakukan berbagai tugas. Beberapa robot artikulasi memiliki struktur bola atau silinder. Mekanisme ini cocok untuk pengelasan, pengemasan, perakitan, dan penanganan material.
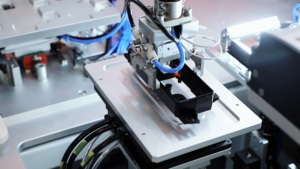
Robot SCARA
Singkatan SCARA berarti Selective Compliance Articulated Robot Arm. Mekanisme robot ini memiliki empat lengan yang terhubung dalam lingkaran dan orientasi vertikal. Pergelangan tangannya dapat bergerak secara horizontal dan melakukan tugas dengan kekuatan dan presisi yang lebih tinggi. Robot SCARA ideal untuk mengambil dan menempatkan objek, merakit komponen, dan melakukan tugas yang presisi.
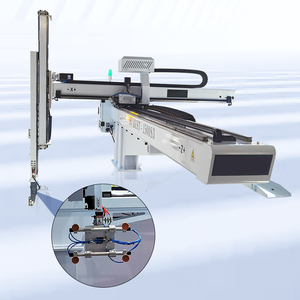
Robot Cartesian
Ini adalah robot gantry yang menggunakan konfigurasi XYZ. Gerakannya dikontrol sepanjang garis lurus pada sumbu X, Y, dan Z. Mekanisme ini sederhana dan akurat, membuatnya cocok untuk tugas seperti pencetakan 3D, ukiran laser, dan penyortiran. Robot Cartesian ideal untuk tugas yang membutuhkan presisi tinggi.
Robot Delta
Robot ini memiliki struktur seperti laba-laba dan biasanya diposisikan di atas kepala. Mereka memiliki tiga lengan yang terhubung ke dasar yang sama, dan end effector-nya bergerak dengan cepat dan akurat. Robot Delta cocok untuk mengambil dan memilah produk dalam pengemasan dan pengolahan makanan. Mereka dapat bekerja di lingkungan ruang bersih dan menangani barang-barang halus karena mereka menerapkan gaya dampak rendah.
Robot Paralel
Robot ini memiliki beberapa lengan yang bekerja secara paralel untuk mengangkat end effector. Mereka biasanya digunakan pada platform yang ditinggikan. Mekanisme ini stabil dan memberikan presisi tinggi. Cocok untuk aplikasi seperti perakitan, operasi, dan simulator penerbangan.
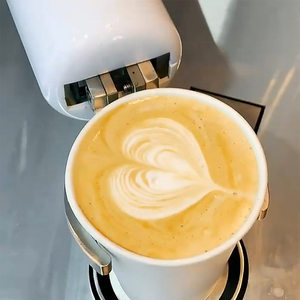
Robot Humanoid
Mekanisme robot humanoid dirancang untuk meniru gerakan manusia. Mereka memiliki dua kaki, lengan, dan bagian tubuh lainnya. Robot dapat berjalan, berlari, memanjat, dan melakukan tugas menggunakan algoritma dan sensor canggih. Contoh robot humanoid termasuk ASIMO dan Sophia.
Berikut adalah beberapa fitur dari mekanisme robot:
Aktuator
Ini adalah otot-otot dari mekanisme. Aktuator bertanggung jawab untuk menggerakkan dan mengendalikan lengan dan kaki robot; mereka mengubah energi yang tersimpan menjadi energi kinetik. Aktuator dapat didefinisikan sebagai mekanisme yang menyebabkan gerakan. Aktuator adalah komponen dari mekanisme robot.
Sensor
Sensor seperti mata dan telinga robot. Mereka memungkinkan robot untuk menerima informasi tentang lingkungannya. Robot menggunakan sensor untuk mendeteksi jarak, suhu, sentuhan, cahaya, suara, dan rangsangan lingkungan lainnya.
Sumber Daya
Sumber daya adalah sumber energi untuk robot. Sering disebut sebagai baterai robot. Sumber daya dapat dalam berbagai bentuk, seperti tenaga hidrolik, tenaga listrik, atau tenaga pneumatik.
End Effector
End effector adalah tangan robot. Mereka melakukan tugas yang diprogram untuk dilakukan oleh robot. Berbagai jenis end effector tersedia untuk berbagai aplikasi, seperti gripper, pengisap, dan alat.
Sistem Kontrol
Sistem kontrol adalah otak dari mekanisme robot. Ini memproses informasi dari sensor dan membuat keputusan tentang cara menggerakkan aktuator. Sistem kontrol dapat berupa program sederhana atau kecerdasan buatan yang kompleks.
Sasis
Sasis adalah badan robot. Ini menampung semua komponen dan menyediakan struktur untuk robot.
Sistem Komunikasi
Sistem komunikasi memungkinkan berbagai komponen robot untuk bekerja bersama. Ini dapat berupa kabel atau nirkabel.
Sistem Umpan Balik
Sistem umpan balik membantu robot melakukan penyesuaian. Ini memberikan informasi tentang kinerja robot dan lingkungan.
Aplikasi dari berbagai jenis mekanisme robot mencakup berbagai industri, menunjukkan keserbagunaan dan kemampuan mereka untuk melakukan tugas dengan presisi dan efisiensi. Berikut adalah beberapa skenario penggunaan utama:
Manufaktur dan Otomatisasi Industri
Robot banyak digunakan dalam manufaktur untuk tugas seperti pengelasan, pengecatan, perakitan, dan penanganan material. Mekanisme lengan robot, dengan sendi dan end-effector yang terartikulasi, sangat efektif dalam melakukan tugas berulang dengan akurasi tinggi.
Pelayanan Kesehatan dan Bidang Medis
Mekanisme lengan robot digunakan dalam operasi invasif minimal, memungkinkan gerakan dan kontrol yang presisi. Selain itu, robot rehabilitasi membantu pasien dalam memulihkan mobilitas melalui latihan terapi yang dipandu.
Eksplorasi dan Pengintaian
Robot dengan berbagai mekanisme digunakan di lingkungan yang berbahaya bagi manusia, seperti eksplorasi laut dalam dan misi luar angkasa. Misalnya, penjelajah Mars menggunakan mekanisme roda untuk melintasi lanskap Mars dan melakukan percobaan.
Pertanian
Traktor dan pemanen otomatis yang dilengkapi dengan mekanisme robot dapat melakukan tugas seperti menanam dan memanen tanaman dengan campur tangan manusia yang minimal. Robot ini menggunakan sensor untuk menavigasi lapangan dan menyelesaikan tugas dengan presisi.
Logistik dan Pengiriman
Drone otonom dan robot pengiriman mengangkut barang di gudang dan area perkotaan. Robot ini menggunakan GPS dan visi komputer untuk menavigasi dan mengirimkan barang secara efisien, mengurangi kebutuhan pengemudi manusia dalam skenario tertentu.
Konstruksi
Robot seperti mekanisme eksoskeleton membantu pekerja dalam mengangkat benda berat dan mengurangi kelelahan. Robot lain dapat mengotomatiskan tugas peletakan batu bata atau pengecatan, meningkatkan efisiensi di lokasi konstruksi.
Perhotelan dan Pelayanan Pelanggan
Robot layanan, seperti resepsionis dan pelayan, menggunakan mekanisme untuk berinteraksi dengan pelanggan dan melakukan tugas seperti mengirimkan pesanan atau memberikan informasi. Robot ini sering kali memiliki fitur humanoid untuk keterlibatan yang lebih baik dengan orang-orang.
Penelitian dan Pendidikan
Robot adalah alat penting di fasilitas penelitian dan institusi pendidikan. Mereka membantu dalam mengajarkan pemrograman dan konsep robotika, dan robot canggih, seperti mekanisme tangan bionik, dapat menunjukkan prinsip biomekanik dan teknologi bantu.
Saat memilih mekanisme robot untuk dijual, pembeli harus mempertimbangkan beberapa faktor untuk memastikan mereka membeli produk yang memenuhi kebutuhan pelanggan mereka. Berikut adalah beberapa di antaranya:
T1. Apa saja jenis-jenis mekanisme robot?
J1. Ada berbagai jenis mekanisme pada robot, termasuk:
T2. Apa pentingnya mekanisme dalam sebuah robot?
J2. Mekanisme penting dalam robot karena memungkinkan robot untuk bergerak dan melakukan tugas. Ini juga memungkinkan robot untuk meniru gerakan organisme hidup.
T3. Apa saja jenis-jenis mekanisme robot untuk pelajar?
J3. Berbagai jenis mekanisme untuk pemula meliputi:
T4. Apa saja komponen utama dari mekanisme robot?
J4. Komponen utama dari mekanisme robot meliputi:
T5. Terbuat dari apa mekanisme robot?
J5. Mekanisme robot terbuat dari berbagai bahan, termasuk logam, plastik, dan silikon. Logam umumnya digunakan untuk kekuatan dan dukungan. Pada saat yang sama, plastik dan silikon digunakan untuk membuat komponen mekanisme robot yang ringan.






