Jenis-jenis Pengontrol Penerbangan Quadcopter Betaflight
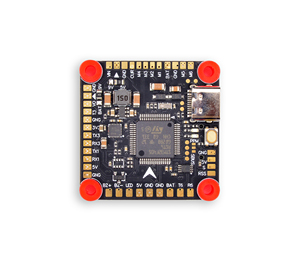
Pengontrol penerbangan quadcopter Betaflight mengelola tugas penerbangan drone balap, quad, dan pesawat model lainnya. Pengontrol ini menggunakan IMU (unit pengukuran inersia) dengan akselerometer dan giroskop untuk mendeteksi pergerakan drone di udara. Kemudian, pengontrol tersebut menyesuaikan kecepatan setiap motor untuk mempertahankan jalur penerbangan yang stabil.
Meskipun fitur spesifik dapat bervariasi, banyak pengontrol penerbangan quadcopter dilengkapi dengan modul GPS dan perangkat lunak yang memungkinkan mereka melakukan pola penerbangan otomatis atau fungsi kembali ke rumah. Pengontrol ini dirancang untuk waktu respons yang cepat, menjadikannya ideal untuk aplikasi balap.
Berikut adalah berbagai jenis pengontrol quadcopter:
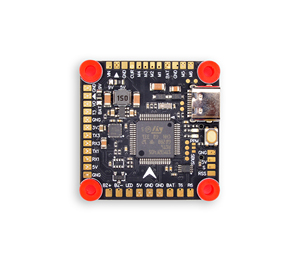
- Pembawa Balap: Ini adalah pengontrol penerbangan kecil dan sederhana untuk pembalap multi-rotor. Pengontrol ini memiliki lebih sedikit fitur tetapi disetel untuk kecepatan dan respons.
- Sumber Terbuka: Pengontrol sumber terbuka memungkinkan firmware khusus, seperti Betaflight atau OpenPilot, untuk di-load. Pengontrol ini menawarkan fleksibilitas paling tinggi dan cocok untuk penggemar yang ingin mengubah pengaturan atau menambahkan fitur.
- GPS: Pengontrol GPS menggunakan sinyal GPS untuk mengaktifkan mode penerbangan tingkat lanjut seperti misi waypoint, lepas landas dan pendaratan otomatis, dan pemeliharaan ketinggian. Biasanya pengontrol ini lebih besar dengan lebih banyak sensor.
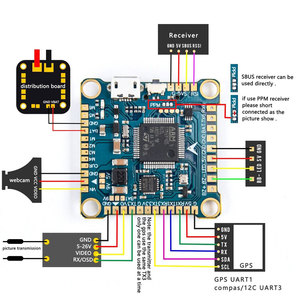
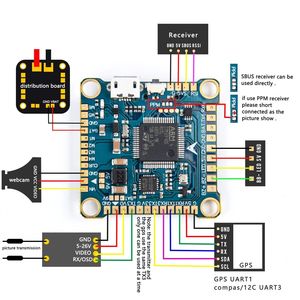
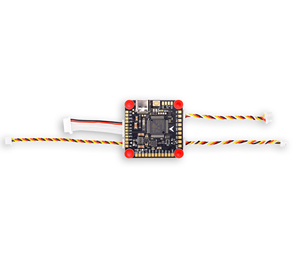
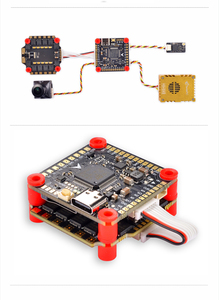
- Sistem Terintegrasi: Beberapa pengontrol penerbangan terintegrasi dengan komponen lain seperti radio telemetri, modul GPS, atau papan distribusi daya. Sistem all-in-one ini menyederhanakan kabel tetapi menawarkan fleksibilitas yang lebih rendah dalam memilih bagian individual.
- Sistem Autopilot: Pengontrol penerbangan autopilot dibuat untuk drone yang perlu melakukan misi otomatis. Pengontrol ini memiliki masa pakai baterai yang lama, redundansi, dan beberapa antarmuka kontrol (seperti stasiun darat).
- Ramah Pemula: Pengontrol penerbangan yang difokuskan untuk pemula siap pakai dengan pengaturan dasar. Pengontrol ini memiliki perangkat lunak yang ramah pengguna untuk penyetelan dan pemecahan masalah yang mudah. Fitur seperti pemeliharaan ketinggian, peringatan berbunyi, dan telemetri membantu pilot baru belajar terbang.
- Sensor Tingkat Lanjut: Beberapa FC dipasang oleh profesional karena mereka memiliki sensor yang lebih canggih (seperti Lidar atau sensor aliran optik) yang berguna untuk aplikasi ilmiah. Sensor ini dapat membantu drone terbang dengan stabilitas yang lebih baik dalam kondisi luar ruangan yang sulit.
Fungsi dan Fitur
Pengontrol penerbangan yang kompatibel penting untuk drone Betaflight. Perangkat lunak ini dijalankan pada papan pengontrol quadcopter. Pengontrol ini menyediakan fitur yang meningkatkan performa dan memudahkan terbang.
Pengguna dapat menyesuaikan pengaturan melalui UI dengan pengontrol penerbangan drone yang memiliki fitur seperti:
- Penyetelan PID: Fitur ini membantu pengguna untuk menyesuaikan stabilitas dan responsivitas quadcopter sesuai preferensi mereka.
- Mode: Berbagai mode terbang memungkinkan pengguna untuk terbang pada level keterampilan yang berbeda.
- Telemetri: Fitur ini dapat mengirimkan data kembali ke pemancar pengguna. Ini termasuk tegangan baterai, kekuatan sinyal, dan peringatan, untuk menyebutkan beberapa.
- Geofencing: Fitur keselamatan tingkat lanjut opsional ini akan memberikan batasan pada ketinggian maksimum dan jarak untuk menghindari risiko.
- Penyelamatan GPS: Fitur ini dapat membawa drone kembali ke posisi rumah dengan bantuan koordinat GPS jika kehilangan koneksi atau di luar kendali.
- Kotak Hitam: Banyak drone QAV 250 dengan pengontrol penerbangan dilengkapi dengan fitur ini, yang mencatat data penerbangan untuk analisis pasca-penerbangan. Fitur ini dapat membantu pengguna memahami apa yang salah jika drone jatuh.
- Pengaturan Mudah: Beberapa pengontrol penerbangan memudahkan untuk mengonfigurasi drone dengan instruksi langkah demi langkah pada antarmuka perangkat lunak.
- Kompatibilitas: Berbagai jenis quadcopter dapat diterbangkan dengan pengontrol penerbangan yang kompatibel dengan Betaflight. Ini termasuk quadcopter balap, multirotor, sayap, dan banyak lagi.
Skenario Pengontrol Penerbangan Quadcopter Betaflight
Pengontrol penerbangan Betaflight digunakan secara luas dalam berbagai aplikasi. Berikut adalah beberapa skenario penggunaan umum:
-
Fotografi dan Videografi Udara
Banyak fotografer dan pembuat film profesional menggunakan quadcopter untuk menangkap bidikan udara yang menakjubkan yang tidak mungkin dicapai dengan kamera tradisional. Fitur penerbangan stabil Betaflight memastikan pergerakan kamera yang halus untuk rekaman berkualitas tinggi. Selain itu, Betaflight memungkinkan penyesuaian sudut kamera selama penerbangan, memungkinkan perspektif bidikan yang beragam.
-
Inspeksi dan Survei Industri
Quadcopter yang dilengkapi dengan kamera dan sensor dapat memeriksa pipa, saluran listrik, turbin angin, dan lokasi konstruksi. Karakteristik penerbangan stabil Betaflight sangat penting untuk menghasilkan gambar dan data yang jernih dalam inspeksi tersebut.
-
Operasi Pencarian dan Penyelamatan
Dalam situasi darurat, quadcopter dapat dikerahkan untuk menemukan orang yang hilang, menilai bencana, atau mengirimkan pasokan. Kemampuan GPS Betaflight memungkinkan operator untuk menetapkan waypoint untuk penerbangan otomatis dalam pola pencarian. Selain itu, kontrol penerbangan yang stabil memastikan pengoperasian yang andal bahkan dalam kondisi yang menantang seperti angin kencang atau visibilitas rendah.
-
Pemetaan dan Aplikasi Geospasial
Berbagai industri menggunakan quadcopter untuk membuat peta dan model 3D untuk pemetaan medan, pemantauan pertanian, konstruksi, dan studi lingkungan. Kontrol penerbangan stabil Betaflight penting untuk konsistensi dan akurasi dalam misi pemetaan. Selain itu, operator dapat menggunakan perangkat lunak stasiun darat untuk merencanakan jalur penerbangan, mengontrol quadcopter secara real-time, dan memproses data yang dikumpulkan setelahnya untuk menghasilkan peta dan model.
-
Penerbangan Rekreasi dan Balap
Banyak penggemar drone menerbangkan quadcopter untuk bersenang-senang atau balap kompetitif. Betaflight menawarkan berbagai mode penerbangan (seperti mode acro dan mode stabil) yang cocok untuk pilot dengan berbagai tingkat keterampilan. Operator dapat menyesuaikan parameter agar sesuai dengan gaya terbang atau tingkat pengalaman mereka.
-
Pemantauan Lingkungan
Ilmuwan dan peneliti menggunakan quadcopter untuk memantau kualitas udara, kondisi cuaca, habitat satwa liar, dll. Kontrol penerbangan stabil Betaflight memastikan bahwa sensor dapat mengumpulkan data secara akurat di berbagai lingkungan. Selain itu, kemampuan jarak jauh dari beberapa quadcopter memungkinkan pengumpulan data jarak jauh di daerah yang sulit dijangkau.
Cara Memilih Pengontrol Penerbangan Quadcopter Betaflight
-
Kompatibilitas Sistem:
Pertimbangkan apakah itu pengontrol sistem tunggal atau banyak sistem. Pengontrol ini kompatibel dengan berbagai sistem kontrol penerbangan, termasuk Betaflight. Pastikan sistem tersebut berfungsi dengan quadcopter yang ditawarkan kepada pelanggan. Cari tahu jumlah sistem yang dapat digunakan secara bersamaan untuk setiap versi pengontrol.
-
Konektivitas Nirkabel:
Periksa fitur konektivitas nirkabel. Ini termasuk kemampuan seperti kontrol jarak jauh dan latensi rendah. Tentukan apakah pengontrol memiliki koneksi nirkabel seperti RF, 2.4 GHz, Wi-Fi, Bluetooth, atau lainnya. Jelajahi dukungan pengontrol untuk protokol komunikasi nirkabel seperti ELRS, Crossfire, dan lainnya di luar Betaflight.
-
Fitur Kontrol:
Lihat fitur kontrol. Pengontrol ini memiliki kontrol yang dapat dikonfigurasi seperti sakelar, penggeser, dan tombol putar. Pengontrol ini dapat digunakan untuk pengalaman terbang mendalam dan mode terbang yang dapat disesuaikan. Jadi, pertimbangkan sistem dengan desain ergonomis untuk pengalaman terbang yang nyaman dan kontrol yang responsif.
-
Kompatibilitas dan Integrasi:
Periksa fitur kompatibilitas dan integrasi. Ini termasuk memastikan integrasi yang mulus dengan Betaflight untuk penyetelan kinerja penerbangan tingkat lanjut. Pastikan produk tersebut kompatibel dengan quadcopter yang akan dijual kepada pelanggan. Periksa ulasan dan peringkat pengguna untuk menilai kinerja dan keandalan. Cari produk dari produsen terkemuka yang dikenal dengan kualitas di industri RC.
-
Rentang dan Resolusi:
Pertimbangkan rentang dan resolusi pengontrol jarak jauh. Evaluasi rentang efektif pemancar RC untuk memastikan bahwa pemancar tersebut sesuai dengan aktivitas penerbangan yang dimaksudkan. Periksa opsi pemancar seperti 2.4 GHz atau frekuensi lainnya untuk kompatibilitas dengan ELRS, Crossfire, dan sistem serupa. Perhatikan resolusi untuk kontrol yang tepat. Ini memungkinkan pengalaman terbang yang responsif dan akurat.
-
Masa Pakai Baterai dan Ketahanan:
Evaluasi masa pakai baterai dan ketahanan produk. Masa pakai baterai penting untuk waktu terbang yang lama dan kesenangan. Pastikan pengontrol RC menawarkan masa pakai baterai yang cukup untuk kebutuhan pengguna. Pertimbangkan kualitas build dan masa pakai baterai. Pilih pengontrol dengan konstruksi tahan lama dan masa pakai baterai yang cukup untuk menahan penggunaan yang sering di lapangan.
-
Opsi Pengisian Daya:
Jelajahi opsi pengisian daya pengontrol penerbangan quadcopter Betaflight. Ini termasuk metode pengisian daya seperti USB, baterai LiPo, atau lainnya. Tentukan apakah pengontrol memerlukan adaptor untuk metode pengisian dayanya. Periksa waktu pengisian daya agar pengguna dapat merencanakannya. Evaluasi masa pakai baterai untuk durasinya sebelum membutuhkan pengisian ulang. Ini memastikan bahwa pengguna menghabiskan lebih banyak waktu di udara daripada mengisi daya pengontrol.
-
Keterbatasan Geografis:
Waspadai batasan geografis. Ini termasuk peraturan dan pembatasan penerbangan pelanggan. Ini penting untuk kepatuhan dan urusan hukum. Cari tahu ke mana setiap pengontrol jarak jauh dapat dikirim. Ini memastikan dukungan pelanggan untuk garansi produk.
T&J
T1: Apa yang dimaksud dengan penyetelan PID, dan mengapa hal itu penting?
J1: Penyetelan PID mengacu pada penyesuaian parameter kontrol pengontrol penerbangan untuk mengoptimalkan kinerja untuk kondisi tertentu. Ini penting karena setiap quadcopter mungkin memerlukan penyetelan untuk memastikan kontrol penerbangan yang stabil dan responsif. Optimasi ini menyesuaikan perilaku quadcopter dengan karakteristik uniknya, kondisi lingkungan, dan kasus penggunaan spesifik, sehingga memungkinkan kinerja terbaik. Faktor-faktor seperti ukuran, distribusi berat, dan spesifikasi motor semuanya berperan dalam menentukan pengaturan penyetelan apa yang paling cocok untuk quadcopter tertentu. Dengan menyesuaikan kontrol ini, pengguna dapat memaksimalkan stabilitas dan responsivitas dalam penerbangan mereka.
T2: Berapa banyak versi firmware Betaflight yang ada?
J2: Ada empat versi firmware Betaflight: Betaflight 4.4, Crystalflight, Ghost, dan OpenTX. Betaflight 4.4 adalah versi firmware stabil terbaru yang tersedia. Pengontrol Crystalflight menawarkan pengalaman terbang yang halus yang mirip dengan yang didasarkan pada Betaflight. Ghost dikenal dengan laju kontrol resolusi tingginya, sementara OpenTX menyediakan platform sumber terbuka yang fleksibel dan dapat disesuaikan untuk pengontrol pengguna.
T3: Peran apa yang dimainkan sensor dalam quadcopter?
J3: Sensor sangat penting untuk menentukan orientasi, ketinggian, kecepatan, dan parameter penting lainnya dari quadcopter. Sensor ini memberikan data yang diproses oleh pengontrol penerbangan untuk mempertahankan kontrol penerbangan yang stabil, bernavigasi, dan melakukan berbagai manuver. Memastikan bahwa sensor berfungsi dengan baik sangat penting untuk keselamatan dan keberhasilan penerbangan. Pada dasarnya, tanpa sensor yang berfungsi dengan baik, quadcopter tidak dapat dikendalikan dengan baik untuk mencapai jalur penerbangan yang diinginkan.
T4: Perawatan baterai seperti apa yang dibutuhkan oleh quadcopter?
J4: Perawatan baterai untuk quadcopter meliputi praktik pengisian daya yang benar, kondisi penyimpanan, dan pemeriksaan kesehatan baterai secara berkala. Penting untuk menghindari pengisian daya atau pengosongan baterai secara berlebihan dan mengeksposnya ke suhu ekstrem. Mengikuti langkah-langkah ini akan membantu pengguna memastikan masa pakai baterai yang lebih lama.



























































































































































































































 浙公网安备 33010002000092号
浙公网安备 33010002000092号 浙B2-20120091-4
浙B2-20120091-4