Jenis-jenis Flight Controller F4 Omnibus
Flight controller F4 omnibus merupakan komponen penting untuk drone dan kendaraan RC. Ini membantu menstabilkan dan menavigasi drone dan kendaraan RC selama penerbangan. Berbagai jenis flight controller F4 omnibus dirancang khusus untuk memenuhi kebutuhan aplikasi tertentu. Ini termasuk;
-
Flight Controller F4 S
Flight controller ini memiliki prosesor 32-bit yang kuat dan OSD terintegrasi. Ini meningkatkan performa drone dan kendaraan RC. Ini memungkinkan pengguna untuk menyesuaikan parameter PID. Pilot dapat memiliki kontrol yang tepat atas karakteristik penerbangan drone atau kendaraan RC. Dengan parameter yang dapat disesuaikan, pengguna dapat mengoptimalkan performa penerbangan. Flight controller ini mendukung berbagai protokol RC. Ini memastikan kompatibilitas dengan merek penerima umum. Ini juga menyediakan kontrol yang andal dan responsif. Flight controller ini mendukung tautan telemetri. Jadi, dapat menyampaikan data penerbangan penting. Beberapa data yang disampaikannya termasuk ketinggian, kecepatan, dan tegangan baterai. Hal ini memungkinkan pilot untuk memantau status penerbangan secara real-time.
-
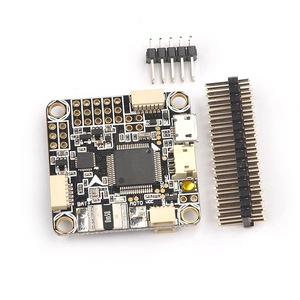
Flight Controller F4 Mini
Flight controller mini dirancang agar kompak dan ringan. Ini cocok untuk digunakan dalam drone mini atau kendaraan RC. Memiliki komponen terintegrasi seperti accelerometer, gyroscope, barometer, dan magnetometer. Mereka membantu menjaga penerbangan tetap stabil.
-
Flight Controller F4 dengan GPS
Flight controller ini bekerja dengan sistem pemosisian global dan memiliki fitur kemampuan waypoint. Ini mendukung fungsi seperti posisi hold dan return to home. Pilot dapat mengoperasikan drone mereka dengan mudah. Flight controller ini memiliki modul GPS terintegrasi. Ini melacak lokasi drone. Dengan ini, misi waypoint dapat dieksekusi. Ada juga port tambahan pada flight controller. Mereka memungkinkan untuk menghubungkan perangkat GPS tambahan. Ini juga memiliki barometer untuk hold ketinggian. Magnetometer untuk kompas heading. Komponen tambahan ini meningkatkan kemampuan navigasi. Flight controller ini memiliki kemampuan waypoint. Ini memungkinkan pengguna untuk memprogram jalur penerbangan yang tepat. Dengan ini, pilot dapat mengoptimalkan penerbangan mereka untuk tugas pemetaan dan survei.
Fungsi & Fitur Flight Controller F4 Omnibus
Flight controller F4 Omnibus memiliki fitur yang meningkatkan kontrol pilot atas pesawat, dan meliputi hal berikut.
-
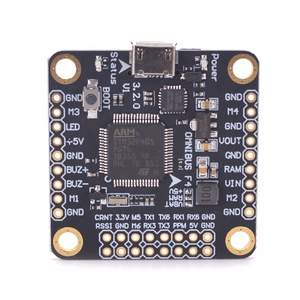
Sensor Bawaan
Biasanya, flight controller menerima informasi dari berbagai sensor untuk membuat keputusan penting. F4 Omnibus memiliki banyak sensor yang meliputi accelerometer, gyroscope, magnetometer, dan barometer. Sensor-sensor ini mengukur sudut, percepatan, laju rotasi, dan ketinggian pesawat. Mereka membantu flight controller mempertahankan kontrol stabil dan mencapai pemosisian yang akurat. Sensor meningkatkan kemampuan flight controller untuk melakukan penerbangan otonom yang stabil.
-
Firmware Pra-instal
Flight controller F4 Omnibus dilengkapi dengan firmware pra-instal yang sudah dikonfigurasi untuk bekerja dengan perangkat keras. Firmware pra-instal mengontrol perilaku flight controller dan mode penerbangan. Ini memberikan pilot platform yang stabil untuk kontrol dan navigasi.
-
Konektivitas USB
Flight controller F4 Omnibus memiliki konektivitas USB, yang memungkinkannya untuk terhubung ke komputer saat diberi daya. Saat terhubung, pilot dapat mengonfigurasi parameter, mode penerbangan, atau pengaturan kontrol menggunakan perangkat lunak kontrol darat.
-
Indikator LED Hijau
Indikator LED hijau menunjukkan apakah flight controller siap untuk terbang atau tidak. Dengan memantau indikator LED hijau, pilot dapat mengetahui kapan harus memulai penerbangan. Biasanya, LED menunjukkan lampu yang stabil saat sistem dihidupkan dan berubah sesuai dengan status kesehatan.
-
Port Telemetri
Beberapa flight controller memiliki port telemetri terpisah yang mendukung komunikasi satu arah atau dua arah. Port telemetri memungkinkan stasiun kontrol darat untuk menerima data dan mengirim perintah kontrol. Beberapa pilot menggunakan port telemetri untuk mengatur sistem komunikasi jarak jauh.
-
Integrasi Multisensor
Flight controller F4 Omnibus mengintegrasikan sistem multisensor yang meliputi sistem GPS. Multisensor meningkatkan kesadaran situasional dan membantu navigasi. Misalnya, sistem GPS menyediakan data tentang lokasi dan kecepatan, sedangkan sensor lainnya menyediakan data tentang orientasi, ketinggian, dan sikap.
-
Pilihan Pemasangan ECU
Pilihan pemasangan ECU memungkinkan flight controller untuk dipasang dengan mudah di berbagai posisi dan orientasi. Idealnya, flight controller perlu dipasang pada posisi yang memungkinkan semua sensor untuk mendeteksi pergerakan pesawat. Posisi yang benar meningkatkan akurasi data sensor.
-
Sensor Suhu
Flight controller F4 Omnibus dilengkapi dengan sensor suhu yang memantau suhu pengoperasian flight controller dan komponen telemetri. Sensor membantu memastikan suhu tetap dalam rentang yang disarankan.
Penggunaan flight controller F4 Omnibus
Flight controller F4 merupakan alat penting bagi pilot. Pada dasarnya, digunakan untuk menentukan posisi dan orientasi drone. Dengan menggabungkan data dari beberapa sensor, seperti gyroscope, accelerometer, magnetometer, dan barometer, flight controller dapat menghitung sikap, heading, dan ketinggian drone. Informasi ini sangat penting bagi pilot untuk mengontrol drone dan membuat penyesuaian terhadap jalur penerbangannya.
Flight controller F4 omnibus juga memainkan peran penting dalam stabilisasi dan navigasi. Kontroler PID pada flight controller dapat secara otomatis menyesuaikan kecepatan motor untuk mempertahankan sikap atau level penerbangan yang diinginkan. Ini membantu menjaga drone tetap stabil di udara, bahkan dalam kondisi berangin. Flight controller bertanggung jawab atas navigasi, seperti misi waypoint atau pendaratan otomatis. Menggunakan GPS dan sensor lainnya, flight controller dapat menentukan posisi drone dan menavigasi ke waypoint yang diinginkan.
- Aplikasi dalam Balap: Dalam situasi balap, drone membutuhkan reaksi yang cepat dan luar biasa terhadap controller. Itu membutuhkan PID yang dioptimalkan agar perubahan cepat dapat dibuat. Pembalap drone menginginkan bobot dan distribusi massa yang minimal agar drone dapat bereaksi lebih cepat. Flight controller yang stabil dan luar biasa diperlukan untuk drone balap, dan mereka dikonfigurasi sebelumnya untuk meringankan beban pengaturan semuanya.
- Fotografi Udara: Drone dilengkapi dengan flight controller untuk membuat videografi dan fotografi udara lainnya yang tepat dan stabil. Semuanya perlu dijaga di bawah kendali dan stabil; karenanya, flight controller sangat berguna. Mereka membuatnya mudah untuk mengontrol drone dan menjaga kestabilannya saat di udara.
- Kapal Drone: Kapal drone membutuhkan flight controller untuk melakukan sebagian besar misi kapal secara otonom. Kapal tersebut memiliki sensor dan aktuator untuk mendeteksi dan menanggapi kondisi lingkungan seperti angin, gelombang, dan arus dan untuk mengontrol pergerakannya dengan tepat. Sistem ini termasuk sistem pemosisian berbasis GPS, sistem navigasi inersia, sensor lingkungan, dan sistem kontrol. Flight controller untuk kapal drone bekerja selaras dengan sistem ini untuk mencapai operasi yang terkontrol dan otonom.
Cara Memilih Flight Controller F4 Omnibus
-
Prosesor dan Performa:
Flight controller F4 dirancang khusus untuk pesawat model. Nomor F4 menghilangkan banyak fitur yang dimiliki F4 sebagai standar. Controller ini memiliki prosesor yang lebih kuat dibandingkan dengan yang lain di pasaran, memberikan pilot performa penerbangan yang lebih baik. Controller yang lebih cepat dan lebih kuat dapat menjalankan perangkat lunak lebih baik dan lebih lancar, memberi pilot kontrol yang lebih tepat atas pesawat rc atau drone.
-
Lingkungan:
Pertimbangkan jenis kondisi penerbangan yang akan dihadapi controller. Banyak flight controller memiliki setidaknya ketahanan air dasar, tetapi controller yang dirancang untuk lingkungan yang keras akan memiliki fitur ketahanan cuaca yang ditingkatkan. Beberapa bahkan memiliki penutup yang dirancang untuk melindungi elektronik yang sensitif dari air, debu, atau puing.
-
Anggaran:
Flight controller F4 tersedia dalam berbagai macam harga. Tentukan anggaran terlebih dahulu dan putuskan fitur mana yang paling penting. Tujuannya adalah untuk menemukan nilai terbaik alih-alih hanya mencoba menemukan yang termurah. Pastikan untuk mempertimbangkan pro dan kontra mendapatkan flight controller F4 yang paling terjangkau dibandingkan dengan yang memiliki spesifikasi dan fitur yang lebih baik dan berada di sektor harga menengah. Controller kelas bawah mungkin hanya memiliki fitur dasar, sedangkan controller kelas atas mungkin memiliki fitur canggih.
-
Integrasi dan Kompatibilitas:
Untuk mencapai kinerja dan fungsionalitas terbaik, pastikan bahwa setiap sistem kontrol penerbangan dapat terintegrasi dengan dan kompatibel dengan sistem dan komponen lain yang ada di pesawat. Ini mungkin termasuk penerima, pengontrol kecepatan elektronik (ESC), sistem telemetri, dan stasiun darat. Berusahalah untuk memilih controller dengan komponen dan fitur yang kompatibel untuk memaksimalkan kemampuan dan menyederhanakan operasi. Meninjau interoperabilitas sebelum membuat pilihan dapat membantu memastikan integrasi dan kompatibilitas yang optimal sejak awal.
-
Pengaturan dan Konfigurasi:
Cari flight controller yang menawarkan proses pengaturan dan konfigurasi yang intuitif. Ini mungkin termasuk perangkat lunak yang ramah pengguna, dokumentasi yang jelas, dan kemampuan konfigurasi untuk menyesuaikan kinerja penerbangan. Pilot baru harus memprioritaskan kemudahan pengaturan, sedangkan pengguna berpengalaman mungkin menghargai kemampuan konfigurasi yang mendalam untuk menyempurnakan pengaturan. Menyeimbangkan pengaturan awal yang mudah dengan penyesuaian tingkat lanjut akan memberikan pengalaman terbaik untuk berbagai tingkat keterampilan. Memilih controller yang sesuai dengan kenyamanan seseorang dengan pengaturan dan konfigurasi dapat memaksimalkan kinerja sejak awal atau menawarkan fleksibilitas bagi mereka yang menginginkan kontrol lebih besar atas penyesuaian.
-
Fitur dan Sensor:
Pertimbangkan fitur dan sensor yang bekerja bersama. Flight controller F4 memiliki banyak sensor yang dibangun di dalamnya. Sensor-sensor ini membantu menstabilkan drone atau pesawat rc saat terbang. Controller menggunakan data dari sensor untuk membantu menjaga pesawat tetap stabil agar lebih mudah terbang. Periksa sensor apa yang dimiliki controller dan berapa banyak. Ini akan membantu menentukan seberapa baik ia dapat memberikan stabilisasi dan kontrol selama penerbangan. Semakin banyak sensor yang ada, semakin baik controller dapat melakukan pekerjaannya dan memberikan pengalaman terbang yang lebih halus. Lihat bagaimana sensor dan controller bekerja bersama agar pesawat dapat terbang dengan stabil dan lebih mudah dikelola. Ini membantu untuk mengetahui tentang fitur dan sensor dari flight controller. Informasi ini menunjukkan bagaimana mereka bekerja bersama untuk meningkatkan kontrol penerbangan.
Flight controller Omnibus F4 menyediakan banyak opsi data sensor untuk membantu menyempurnakan kinerja. Pertimbangkan sensor yang disertakan dengan controller. Ini mungkin termasuk barometer, GPS, magnetometer, tabung PITOT, dan accelerometer. Setiap sensor menawarkan data unik untuk meningkatkan terbang. Barometer membantu mengukur ketinggian dengan lebih akurat. GPS memungkinkan navigasi dan pemosisian yang lebih baik. Magnetometer membantu dengan kontrol kompas dan arah. Tabung PITOT memberikan informasi tentang kecepatan dan tekanan udara. Accelerometer melacak gerakan dan percepatan. Kombinasi sensor ini bekerja bersama untuk mengoptimalkan stabilisasi, kontrol, dan pengumpulan data. Hal ini meningkatkan pengalaman penerbangan secara keseluruhan.
-
Ulasan dan Rekomendasi:
Sebelum membeli flight controller F4 Omnibus, baca ulasan dan dapatkan rekomendasi dari sumber terpercaya. Ini dapat membantu memilah banyak opsi yang tersedia dan menunjukkan controller yang benar-benar bekerja dengan baik dalam penggunaan yang dimaksudkan. Melihat apa yang dikatakan orang lain tentang pengalaman mereka dapat memberikan wawasan berharga tentang bagaimana model yang berbeda bekerja. Perhatikan umpan balik dari pengguna yang kebutuhan dan pengaturan penerbangannya mirip. Ulasan dan rekomendasi dari tempat tepercaya dapat memberikan informasi tentang fitur, umur panjang, dan kemudahan penggunaan. Ini dapat membantu dalam memilih controller yang cenderung memenuhi persyaratan. Membuat pilihan berdasarkan pengalaman bersama adalah cara yang efektif untuk mengevaluasi opsi potensial dan membuat keputusan yang lebih tepat.
Pertanyaan & Jawaban Flight Controller F4 Omnibus
T: Bagaimana cara memasang flight controller F4?
J: Pemasangan flight controller F4 bergantung pada model spesifiknya. Umumnya, melibatkan pengamanan controller ke rangka drone, menghubungkan controller ke ESC motor dan penerima, dan memastikan semua kabel rapi dan aman.
T: Bagaimana cara memperbarui firmware pada flight controller F4?
J: Sebagian besar flight controller F4 memiliki port micro USB atau USB Type-C. Untuk memperbarui firmware, hubungkan flight controller ke komputer dengan perangkat lunak terbuka seperti INAV atau Betaflight. Ikuti petunjuk perangkat lunak untuk mem-flash firmware terbaru.
T: Bagaimana cara menyetel PID pada controller F4?
J: Penyetelan PID sangat penting untuk mengoptimalkan kontrol penerbangan drone. Dapat dilakukan secara real-time menggunakan perangkat lunak Betaflight atau INAV. Kedua program perangkat lunak menawarkan antarmuka penyetelan PID untuk F4, di mana pengguna dapat menyesuaikan nilai dan melihat dampaknya pada perilaku drone.
T: Apa jenis konektor yang paling umum untuk flight controller F4?
J: Konektor yang paling umum adalah JST, PH2.5, PH2.0, XT30, dan XT60. Beberapa controller dilengkapi dengan konektor ini, sementara yang lain hanya memiliki harness pigtail yang menghubungkan ke baterai atau motor. Periksa spesifikasi setiap controller untuk jenis konektor.























































































































































































 浙公网安备 33010002000092号
浙公网安备 33010002000092号 浙B2-20120091-4
浙B2-20120091-4